Regular (constant gradient moment) EPG#
In the regular EPG model (C++, Python), the dephasing is reduced to a unitless integer \(k\ge 0\) which represents a multiplicative factor of some arbitrary basic dephasing. The implementation of regular EPG in Sycomore has two high-level operations: apply_pulse (C++, Python) to simulate an RF hard pulse and apply_time_interval (C++, Python) which simulates relaxation, diffusion and dephasing due to gradients. The lower-level EPG operators used by apply_time_interval are also accessible as relaxation (C++, Python), diffusion (C++, Python) and shift (C++, Python). The orders and states of the model are stored in respectively in orders (C++, Python) and states (C++, Python), and the fully-focused magnetization (i.e. \(F_0\)) is stored in echo (C++, Python).
For simulations involving multiple dephasing values (all multiple of a given dephasing), the “unit” dephasing must be declared when creating the model; for simulations involving only a single dephasing value, this declaration is optional, but should be present nevertheless.
The following code sample simulates the evolution of the signal in an RF-spoiled GRE experiment with different phase increments – one model is used per phase increment.
import numpy
import sycomore
from sycomore.units import *
species = sycomore.Species(1000*ms, 1000*ms)
# Sequence parameters
flip_angle=30*deg
TE = 5*ms
TR = 25*ms
phase_steps = [0*deg, 90*deg, 117*deg, 180*deg]
slice_thickness = 1*mm
tau_readout = 1*ms
repetitions = int((5*species.T1/TR))
# Motion to k-space extremity and its associated gradient amplitude
k_max = 0.5 * 2*numpy.pi/slice_thickness
G = k_max / sycomore.gamma / (tau_readout/2)
models = [
sycomore.epg.Regular(species, unit_dephasing=k_max) for _ in phase_steps]
signals = numpy.zeros((len(models), repetitions), dtype=complex)
for r in range(0, repetitions):
for index, (phase_step, model) in enumerate(zip(phase_steps, models)):
phase = (phase_step * 1/2*(r+1)*r)
# RF-pulse and idle until the readout
model.apply_pulse(flip_angle, phase)
model.apply_time_interval(TE-tau_readout)
# Readout prephasing and first half of the readout
model.apply_time_interval(-G, tau_readout/2)
model.apply_time_interval(+G, tau_readout/2)
# Echo at the center of the readout, cancel the phase imparted by the
# RF-spoiling
signals[index, r] = model.echo * numpy.exp(-1j*phase.convert_to(rad))
# Second half of the readout, idle until the end of the TR
model.apply_time_interval(+G, tau_readout/2)
model.apply_time_interval(TR-TE-tau_readout/2)
#include <cmath>
#include <sycomore/epg/Regular.h>
#include <sycomore/Species.h>
#include <sycomore/sycomore.h>
#include <sycomore/units.h>
int main()
{
using namespace sycomore::units;
sycomore::Species species(1000*ms, 100*ms);
// Sequence parameters
auto flip_angle=30*deg, TE=5*ms, TR=25*ms;
std::vector<sycomore::Quantity> phase_steps{0*deg, 90*deg, 117*deg, 180*deg};
auto slice_thickness=1*mm, tau_readout=1*ms;
std::size_t repetitions = std::lround(5*species.T1()/TR);
// Motion to k-space extremity and its associated gradient amplitude
auto k_max = 0.5 * 2*M_PI / slice_thickness;
auto G = k_max / sycomore::gamma / (tau_readout/2);
std::vector<sycomore::epg::Regular> models;
for(std::size_t i=0; i!=phase_steps.size(); ++i)
{
models.push_back(sycomore::epg::Regular(species, {0,0,1}, 100, k_max));
}
sycomore::TensorC<2> signals({models.size(), repetitions}, 0);
for(std::size_t r=0; r!=repetitions; ++r)
{
for(std::size_t index=0; index!=phase_steps.size(); ++index)
{
auto & phase_step = phase_steps[index];
auto & model = models[index];
auto phase = phase_step * 1/2 * (r+1) * r;
// RF-pulse and idle until the readout
model.apply_pulse(flip_angle, phase);
model.apply_time_interval(TE-tau_readout);
// Readout prephasing and first half of the readout
model.apply_time_interval(-G, tau_readout/2);
model.apply_time_interval(+G, tau_readout/2);
// Echo at the center of the readout, cancel the phase imparted by
// the RF-spoiling
signals(index, r) =
model.echo() * std::exp(sycomore::Complex(0, phase));
// Second half of the readout, idle until the end of the TR
model.apply_time_interval(+G, tau_readout/2);
model.apply_time_interval(TR-TE-tau_readout/2);
}
}
return 0;
}
Once the echo signal has been gathered for all repetitions, its magnitude and phase can be plotted using respectively numpy.abs and numpy.angle.
import matplotlib.pyplot
figure, plots = matplotlib.pyplot.subplots(
2, 1, sharex=True, tight_layout=True, figsize=(8, 8))
for index, (s, phi) in enumerate(zip(signals, phase_steps)):
plots[0].plot(
range(repetitions), numpy.abs(s), f"C{index}",
label=rf"$\phi_{{inc}} = {phi.convert_to(deg):.0f}°$")
plots[1].plot(range(repetitions), numpy.angle(s), f"C{index}")
plots[0].set(ylim=0, ylabel="Magnitude (a.u.)")
plots[1].set(
xlim=(0, repetitions-1), ylim=(-numpy.pi, +numpy.pi),
xlabel="Repetition", ylabel="Phase (rad)")
plots[0].legend()
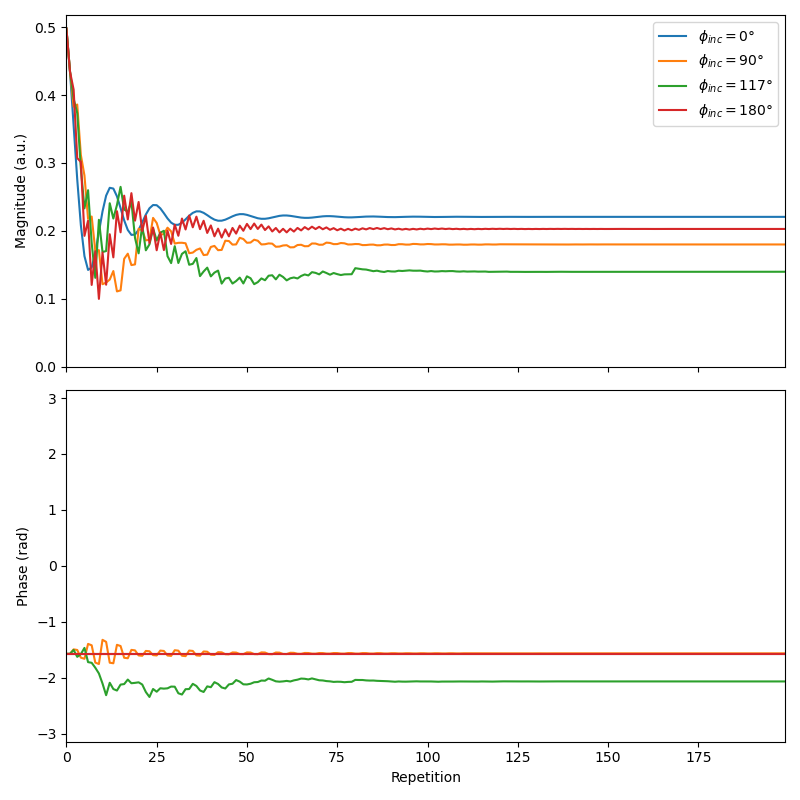
Simulation of RF spoiling with regular EPG, using different phase steps#